Zeyu Lu, Xingyu Gao, Haoyong Yu
[Paper] [Code] [Website] [Video] [Bibtex]
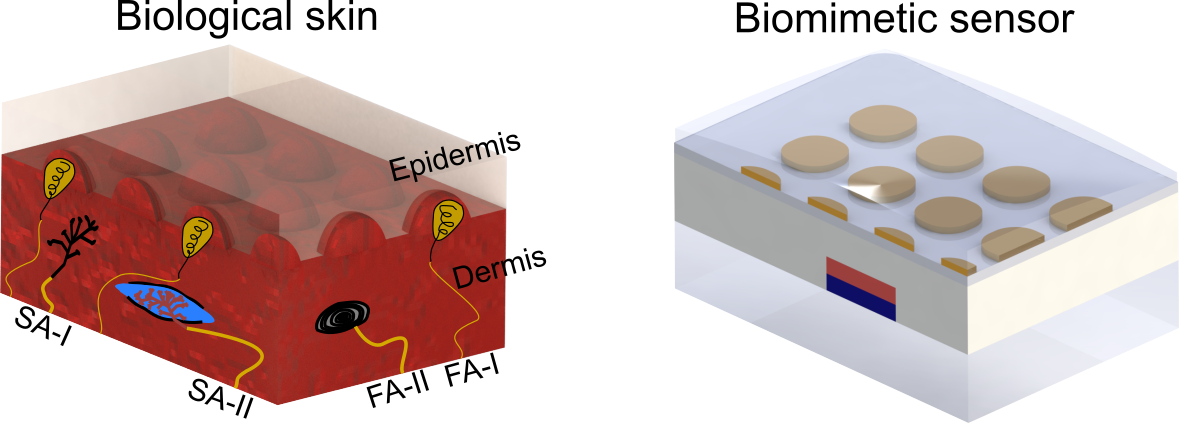
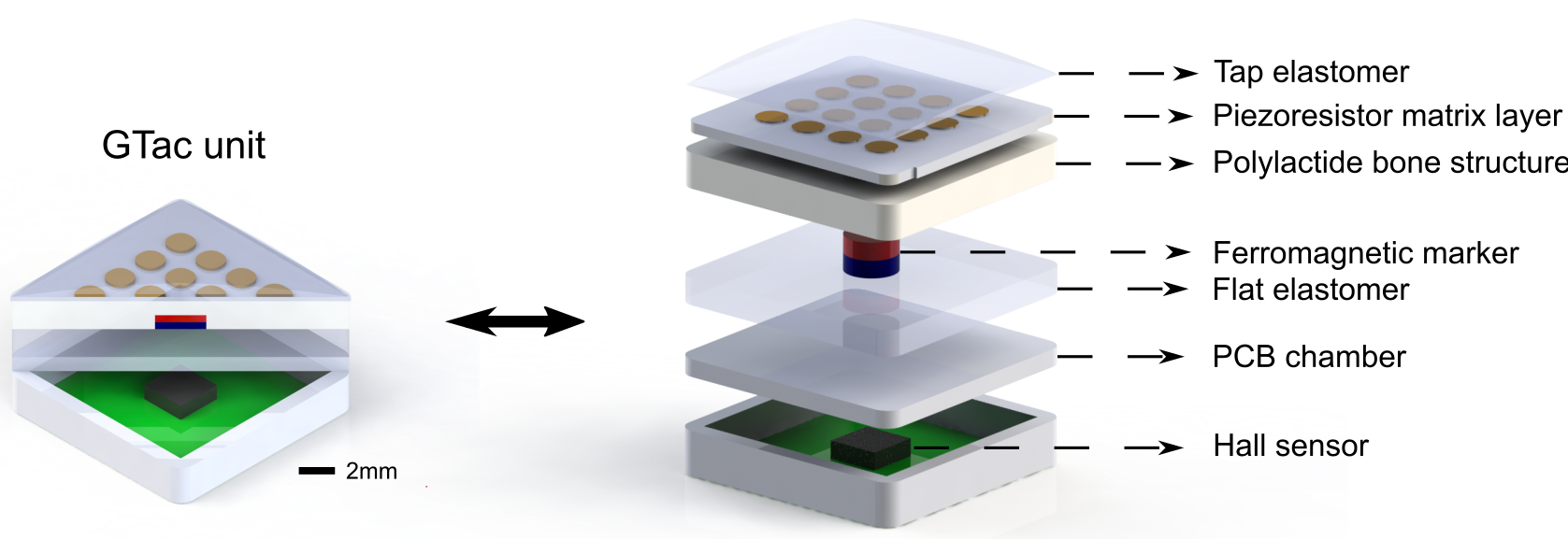
Abstract—Human hands can effectively perform daily activities, such as grasping and handovers of fragile objects, utilizing the tactile sensing capabilities which simultaneously perceive normal and shear forces via the mechanoreceptors highly integrated into the fingers and palm; here, human somatosensory systems leverage complex tactile feedback into patterns and identify the extrinsic contact states (ECSs) of objects in contact-rich tasks. Similarly, these features are still open issues and critical for robots in acquiring such human skills. In this letter, we integrate GTac sensors into a robotic hand, GTac-Hand, to obtain tactile feedback from its fingers and palm, resulting in 285 tactile measurements. Our results show that GTac-Hand can grasp delicate objects and precisely identify their ECSs via human-like patterning and learning models, which can be used for robots to perform challenging tasks, such as delicate object grasping, object handovers, and ball-hit recognition.
@misc{lu2022gtac,
title={GTac: A Biomimetic Tactile Sensor with Skin-like Heterogeneous Force Feedback for Robots},
author={Zeyu Lu and Xingyu Gao and Haoyong Yu},
year={2022},
eprint={2201.12005},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
This project is supervised by Prof. Haoyong Yu in Biorobotics Lab @NUS. This work was supported by Agency for Science, Technology and Research, Singapore, under the National Robotics Program, with A*star SERC Grant No.: 192 25 00054.
![]()