Zeyu Lu, Haotian Guo, Wensi Zhang, Haoyong Yu
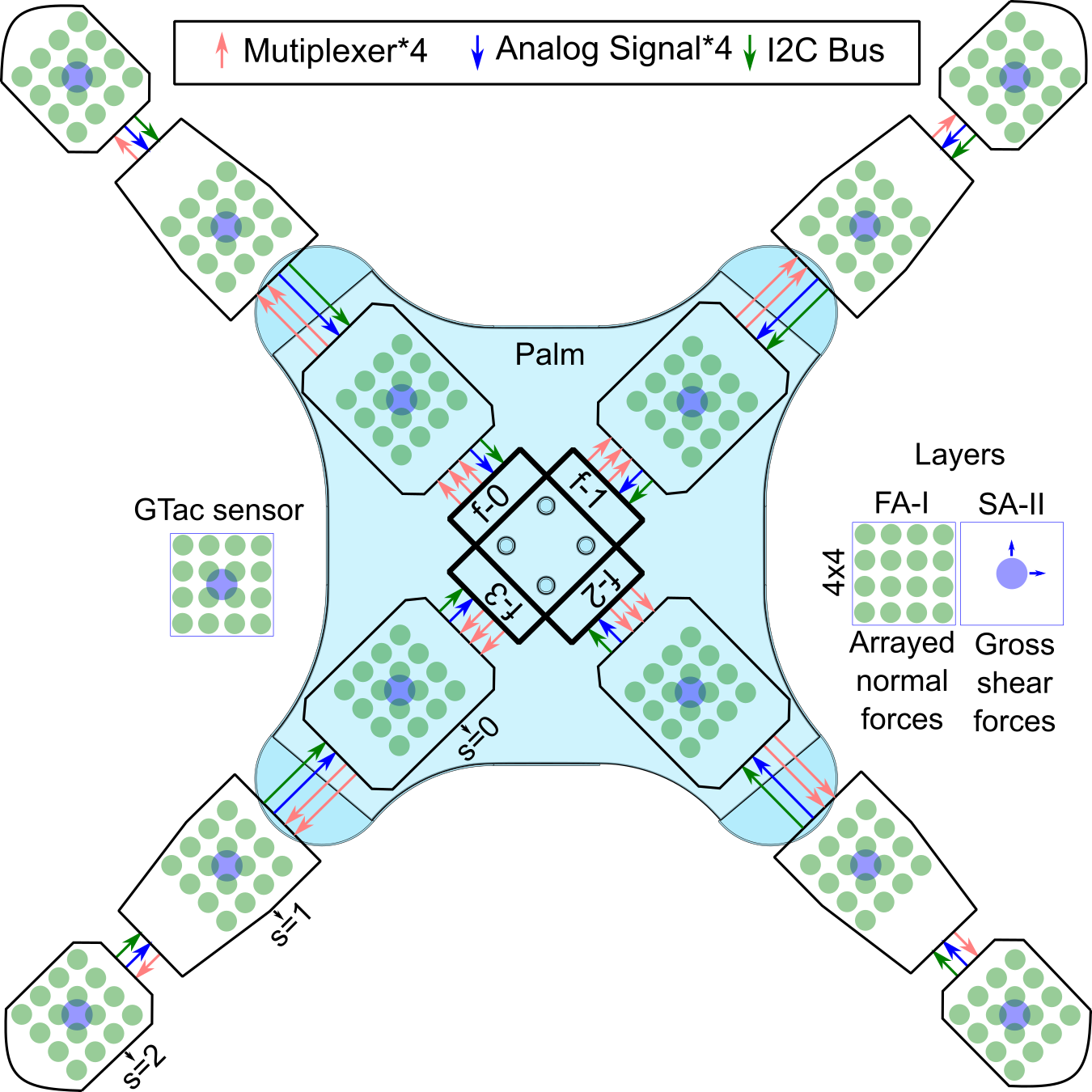
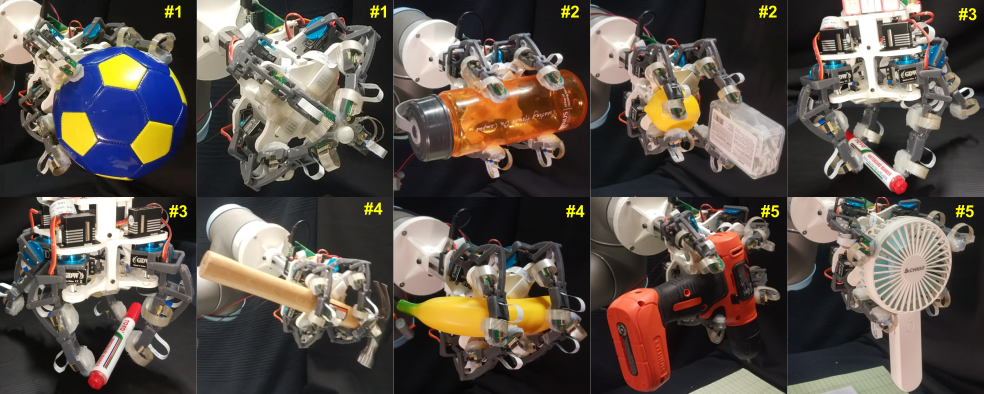
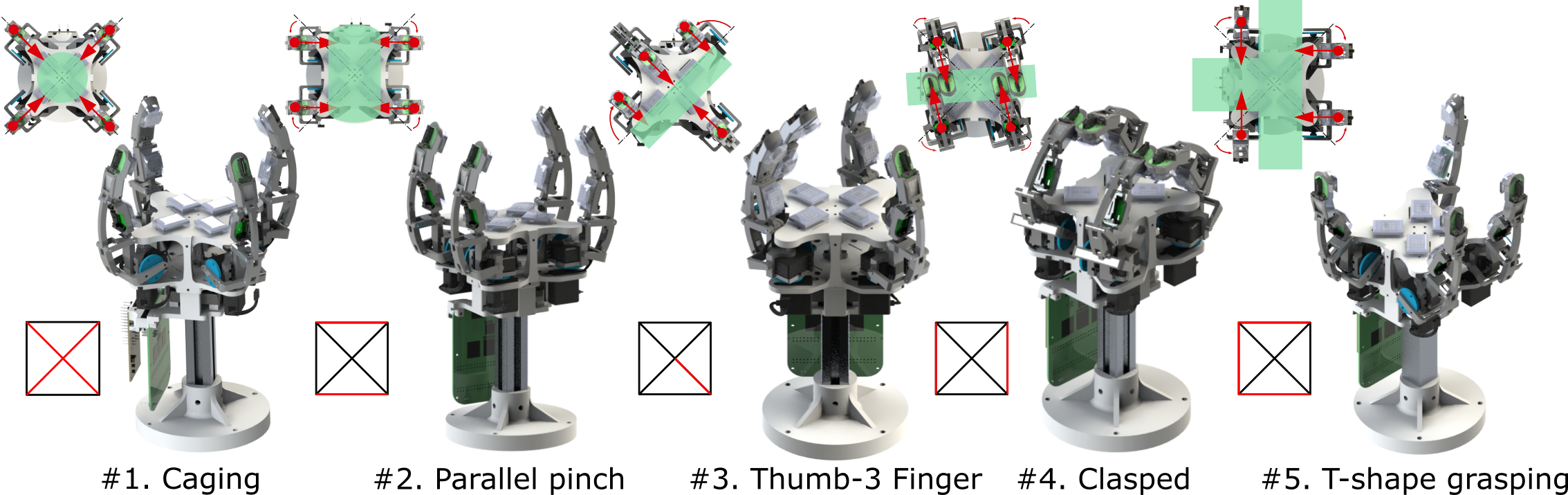
Abstract—Dexterity and tactile sensing have been the key challenges for robotic grippers to interact with everyday objects of various shapes and sizes, such as grasping and manipulation. A reconfigurable mechanism with a multi-fingered design enables grippers to perform multiple grasping gestures for different objects. Moreover, tactile feedback is needed to facilitate the grasping and manipulation tasks for a larger range of objects with closed-loop control. Therefore, it is crucial to develop a reconfigurable multi-fingered gripper with integrated tactile sensing capabilities. In this letter, we present a robotic gripper with a reconfigurable mechanism and biomimetic tactile sensors integrated into the fingers and palm. Our gripper with four adaptive fingers can perform 5 grasping gestures and obtain 228 tactile feedback signals (normal and shear forces) in 150 Hz. We show that the gripper can grasp various everyday objects and achieve in-hand manipulation including translation and rotation with closed-loop control. This research provides a new hardware design and could be beneficial to various robotic applications in the domestic and industrial fields.
Conceptualization: Z.L., H.G., and H.Y.
Methodology: Z.L., H.G., and H.Y.
Electronic Parts: Z.L.
Mechanical Parts: H.G. and Z.L.
Investigation: Z.L. and H.G.
Visualization: Z.L., H.G., and W.Z.
Funding acquisition: H.Y.
Project administration: H.Y.
Supervision: H.Y.
Writing – original draft: Z.L.
Writing – review & editing: Z.L., H.G., W.Z., and H.Y.
This project is supervised by Prof. Haoyong Yu in Biorobotics Lab @NUS. This work was supported by Agency for Science, Technology and Research, Singapore, under the National Robotics Program, with A*star SERC Grant No.: 192 25 00054.
![]()